腿式机器人领域正在迅速发展,这得益于麻省理工学院以高速敏捷而闻名的猎豹和波士顿动力公司为现实世界应用设计的机器人Spot等创新。
设计让机器人动物行走、奔跑和穿越各种地形并非易事,但已经取得了开创性的进展。通过将硬件推向极限,麻省理工学院的机器人猎豹打破了有记录以来跑得最快的记录。
这些进步的核心是多轴力传感器的开发,它提供了对地面反作用力的精确测量。
这些传感器是麻省理工学院仿生机器人实验室的产品,使用SciChart进行了可视化、校准和优化,SciChart是一个行业领先的跨平台图表库,用于高性能遥测仪表板和数据可视化。
SciChart在力传感器开发中的作用
麻省理工学院的仿生机器人实验室面临着一个关键挑战:设计一种轻便但高度精确的力传感器,以捕捉机器人动物高速运动过程中的动态法向力和剪切力。
该团队开发了一种仿生脚垫传感器,将气压传感器嵌入聚合物层中。这些检测高度和大气压的变化,支持明智的决策,以支持各种天气条件下的一致运动。机器人需要适应的一个例子是遇到有滑倒风险的冰面。快速检测地形变化将帮助机器人动物自信地在更广泛的环境中导航。
这一创新设计实现了:
高精度:可精确测量垂直方向上高达300N的力和水平方向上±80N的力。
强大的数据捕获:在快速运动过程中实时捕获地面反作用力。
数据的数量和复杂性需要先进的可视化工具。SciChart的Android图表库已准备好迎接挑战。
它能够实时处理数百万个数据点,即使在较低级别的硬件上也不会减慢速度,使研究人员能够以无与伦比的速度和精度分析多轴传感器输出。这最终有助于验证和优化传感器性能。
从数据流到可操作的见解
SciChart在将原始遥测数据转化为可操作的见解方面发挥了关键作用。高性能的Android图表库使麻省理工学院的研究人员能够:
可视化实时交互:精确监控高速运动过程中的动态力响应。
优化传感器设计:分析脚垫在不同力下的变形,以优化传感器几何形状。
增强校准工作流程:与神经网络无缝集成,以改进校准和可操作的力预测。
将高级数据可视化集成到传感器开发工作流程中,有助于实现高性能机器人解决方案。
可视化多轴力数据
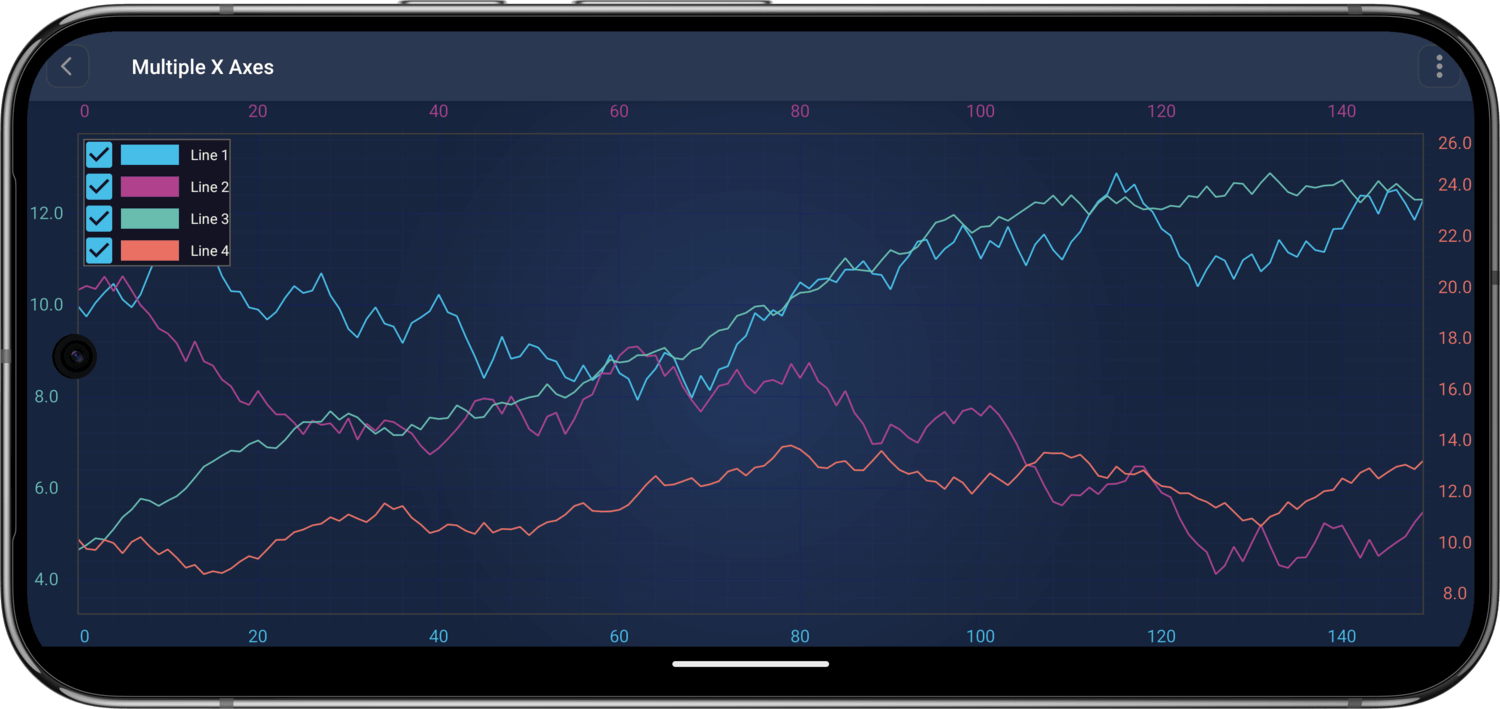
SciChart先进的遥测仪表板使研究人员能够实时与高频力数据进行交互。
这些直观的可视化有助于:
绘制脚垫上的压力分布图,以增强设计迭代。
分析在不同地形上运动时的复杂力动力学。
简化基于神经网络的校准模型的验证过程。
通过将密集的遥测数据流转化为可操作的视觉效果,SciChart支持快速决策,这对推进麻省理工学院的机器人项目至关重要。
弥合差距:从猎豹到斑点
不再是科幻小说的作品,麻省理工学院猎豹项目开创的技术为腿式机器人的更广泛进步奠定了基础。这包括波士顿动力公司的Spot,一种能够穿越复杂现实环境的机器人。
虽然Spot是从一个独立的谱系中出现的,但通过SciChart改进的力传感原理和遥测数据可视化方法是其成功的核心。
Spot在各个行业都有多个用例,可以改善健康和安全以及危害调查,包括轻松地在建筑工地、工厂车间和研究实验室进行导航,以检测和监测危害。
Spot可以代表您的团队进行调查,而不是派遣您的团队检查潜在的危险情况。凭借自动感应、运动智能、无限的数据收集能力和360°感知,这款敏捷的机器人能够胜任这项任务。
Spot可以沿着计划的路线巡逻设施,以发现可能因人为错误或缺乏人力资源而被忽视的问题。
Spot已经成为国家电网团队的一员,支持员工安全和设备正常运行时间,以帮助国家供电。
用SciChart推进机器人的未来
从猎豹这样的实验平台到Spot这样的现实世界机器人,SciChart改变了研究人员处理复杂数据可视化的方式。
通过精确了解传感器性能和校准,SciChart使机器人行业能够突破创新的界限。随着腿式机器人技术的不断发展,SciChart仍然处于领先地位,凭借其64位图表库推动下一代敏捷、自适应系统的发展。
SciChart对麻省理工学院力传感器突破的贡献证明了其在高性能遥测数据可视化方面无与伦比的价值。从F1到腿式机器人,SciChart实现了变革性的创新,确保研究人员拥有在精度和性能方面达到新高度所需的工具。